Source: Physics Competition - Mechanics
Problem Sets:
Problem
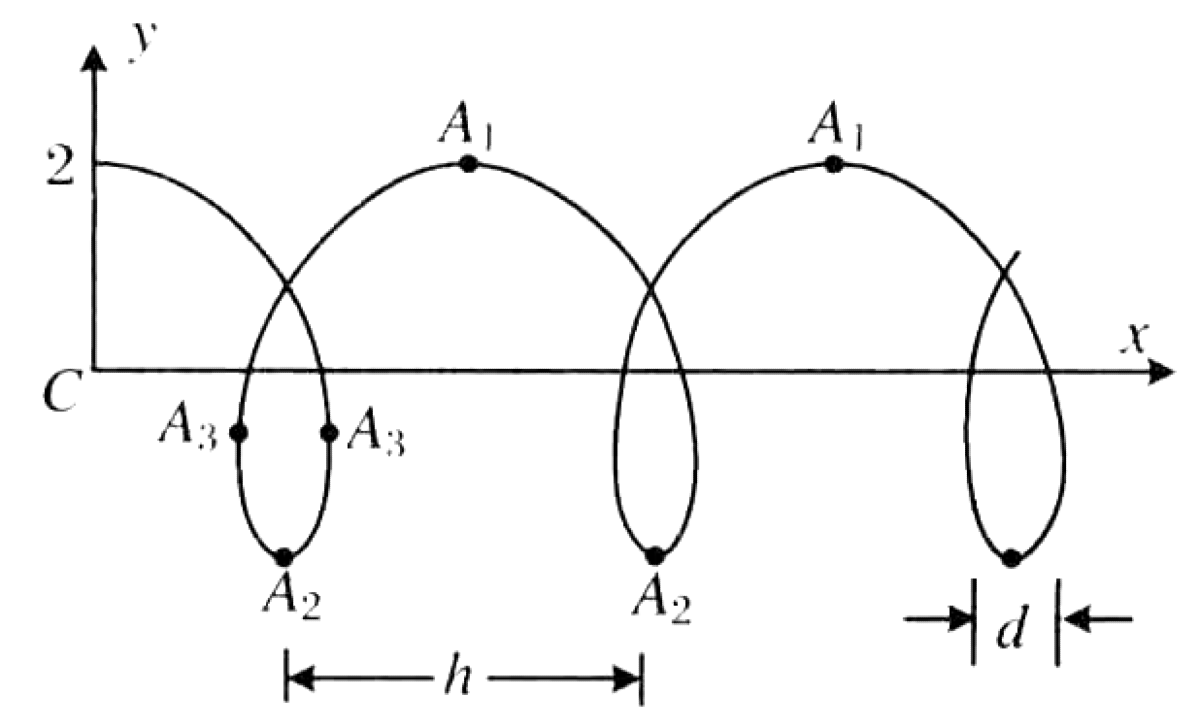
Two point masses, 1 and 2, with masses $m_1$ and $m_2$ ($m_1 > m_2$) respectively, are on a smooth horizontal table. They are connected by a light, inextensible string of length $L$. Initially, mass 1 is held fixed while mass 2 revolves around it in a circle. Then, mass 1 is released, and mass 2 follows the trajectory shown in the figure.
- Find the spacing $h$ (distance between neighboring points $A_2$) and the loop width $d$ (distance between neighboring points $A_2$) of the trajectory. And find the height of the loop $H$ (vertical distance between neighboring points of $A_1$ and $A_2$).
- Find the radius of curvature of the trajectory of $m_2$ at its turning points (points of maximum and minimum vertical displacement).
P0737-problem-1
Hints
Hint 1: What is the motion of the CM and what is the motion of $m_1$ and $m_2$ relative to CM?
Hint 2: Are you sure that point $A_3$ are on the path of the CM? What is the absolute or relative velocity of $m_2$ at point $A_3$?
[Q1]
- Spacing: $h = \frac{2\pi m_2 L}{m_1 + m_2}$
- Loop width: $d = \frac{2L}{m_1+m_2} \left( \sqrt{m_1^2 - m_2^2} - m_2 \arccos\left(\frac{m_2}{m_1}\right) \right)$
- Loop height: $H = \frac{2m_1 L}{m_1 + m_2}$
[Q2]
- Radius of curvature at $A_1$ (top): $\rho_1 = \frac{(m_1+m_2)L}{m_1}$
- Radius of curvature at $A_2$ (bottom): $\rho_2 = \frac{(m_1-m_2)^2 L}{m_1(m_1+m_2)}$
The problem can be solved by decomposing the motion of the two-mass system into the motion of its center of mass (CM) and the motion of the masses relative to the CM.
1. Center of Mass and Relative Motion
Since the two masses are on a smooth horizontal table, there are no external horizontal forces acting on the system. Therefore, the momentum of the CM is conserved, and the CM moves with a constant velocity $\vec{V}_{CM}$. The internal tension force does no work, so the total mechanical energy is conserved. Also, with no external torque, the angular momentum about the CM is conserved.
Initially, $m_1$ is at rest and $m_2$ has speed $v_0$. The velocity of the CM is:
$$ V_{CM} = \frac{m_1(0) + m_2 v_0}{m_1 + m_2} = \frac{m_2 v_0}{m_1 + m_2} $$The CM moves in a straight line, which we take as the x-axis.
Relative to the CM, the two masses revolve in circles due to the conservation of angular momentum. The radii of their orbits are:
$$ r_1 = \frac{m_2}{m_1 + m_2} L \quad \text{and} \quad r_2 = \frac{m_1}{m_1 + m_2} L $$The angular velocity $\omega$ of their revolution remains the same as the initial angular velocity of $m_2$ around $m_1$, which is $\omega = v_0 / L$. The speed of $m_2$ relative to the CM is constant:
$$ v_{2,CM} = r_2 \omega = \left(\frac{m_1 L}{m_1 + m_2}\right) \left(\frac{v_0}{L}\right) = \frac{m_1 v_0}{m_1 + m_2} $$The trajectory of $m_2$ is a trochoid, resulting from the superposition of the CM's linear motion and $m_2$'s circular motion around the CM. Since $m_1 > m_2$, we have $v_{2,CM} > V_{CM}$, which results in loops.
[Q1] Spacing $h$, Loop Width $d$, and Loop Height $H$
The period of one revolution about the CM is $T = 2\pi/\omega = 2\pi L/v_0$.
-
Spacing $h$: This is the horizontal distance the CM travels during one period.
$$ h = V_{CM} T = \left(\frac{m_2 v_0}{m_1 + m_2}\right) \left(\frac{2\pi L}{v_0}\right) = \frac{2\pi m_2 L}{m_1 + m_2} $$ -
Loop Height $H$: This is the vertical distance between the highest point ($A_1$) and the lowest point ($A_2$) of the trajectory of $m_2$. This corresponds to the diameter of the circular path of $m_2$ about the CM.
$$ H = 2r_2 = \frac{2m_1 L}{m_1 + m_2} $$ -
Loop Width $d$: This is the horizontal width of a loop, bounded by the points where the horizontal velocity of $m_2$ is zero. Let the CM move along the x-axis. The velocity of $m_2$ is $\vec{v}_2 = \vec{V}_{CM} + \vec{v}_{2,CM}$. The horizontal component is $v_{2x} = V_{CM} + v_{2,CM,x}$. For a loop to form, $v_{2x}$ must be zero at two points. This occurs when the horizontal component of the rotational velocity opposes the CM velocity: $v_{2,CM,x} = -V_{CM}$. Let $\theta$ be the angle of the position vector $\vec{r}_{2,CM}$ with the y-axis. Then $v_{2,CM,x} = v_{2,CM} \cos\theta$. So, $v_{2,CM} \cos\theta = -V_{CM}$, which gives $\cos\theta = -V_{CM}/v_{2,CM} = -m_2/m_1$. Let $\delta = \arccos(m_2/m_1)$. The loop is bounded by angles $\theta = \pi \pm \delta$. The parametric equations for the trajectory of $m_2$ are $x_2(t) = V_{CM}t + r_2\sin(\omega t)$ and $y_2(t) = r_2\cos(\omega t)$ (with $A_1$ at $t=0$). The horizontal turning points correspond to times $t$ where $\omega t = \pi \mp \delta$. The width $d$ is the difference in the x-coordinates at these times:
$$ d = 2 \left( r_2 \sin\delta - \frac{V_{CM}}{\omega} \delta \right) $$Substituting $r_2=\frac{m_1 L}{M}$, $\frac{V_{CM}}{\omega}=\frac{m_2 L}{M}$, and $\sin\delta = \sqrt{1-\cos^2\delta} = \frac{\sqrt{m_1^2 - m_2^2}}{m_1}$:
$$ d = \frac{2L}{m_1+m_2} \left( \sqrt{m_1^2 - m_2^2} - m_2 \arccos\left(\frac{m_2}{m_1}\right) \right) $$
[Q2] Radius of Curvature at Turning Points
The radius of curvature is given by $\rho = v^2/a_n$, where $a_n$ is the normal component of acceleration. The acceleration of $m_2$ is caused by the constant tension $T$ in the string:
$$ a_2 = \frac{T}{m_2} = \frac{1}{m_2} (m_1 r_1 \omega^2) = \frac{m_1}{m_2} \left(\frac{m_2 L}{m_1+m_2}\right) \left(\frac{v_0}{L}\right)^2 = \frac{m_1 v_0^2}{(m_1+m_2)L} $$At the turning points $A_1$ and $A_2$, the velocity $\vec{v}_2$ is purely horizontal, while the acceleration $\vec{a}_2$ (directed towards $m_1$) is purely vertical. Thus, the acceleration is entirely normal, $a_n = a_2$.
-
At point $A_1$ (top): The velocities $\vec{V}_{CM}$ and $\vec{v}_{2,CM}$ add up.
$$ v(A_1) = V_{CM} + v_{2,CM} = \frac{m_2 v_0}{M} + \frac{m_1 v_0}{M} = v_0 $$ $$ \rho_1 = \frac{v(A_1)^2}{a_2} = \frac{v_0^2}{\frac{m_1 v_0^2}{(m_1+m_2)L}} = \frac{(m_1+m_2)L}{m_1} $$ -
At point $A_2$ (bottom): The velocities $\vec{V}_{CM}$ and $\vec{v}_{2,CM}$ are in opposite directions.
$$ v(A_2) = v_{2,CM} - V_{CM} = \frac{m_1 v_0}{M} - \frac{m_2 v_0}{M} = \frac{(m_1-m_2)v_0}{m_1+m_2} $$ $$ \rho_2 = \frac{v(A_2)^2}{a_2} = \frac{\left(\frac{(m_1-m_2)v_0}{m_1+m_2}\right)^2}{\frac{m_1 v_0^2}{(m_1+m_2)L}} = \frac{(m_1-m_2)^2 L}{m_1(m_1+m_2)} $$