Source: Physics Competition - Mechanics
Problem Sets:
Problem
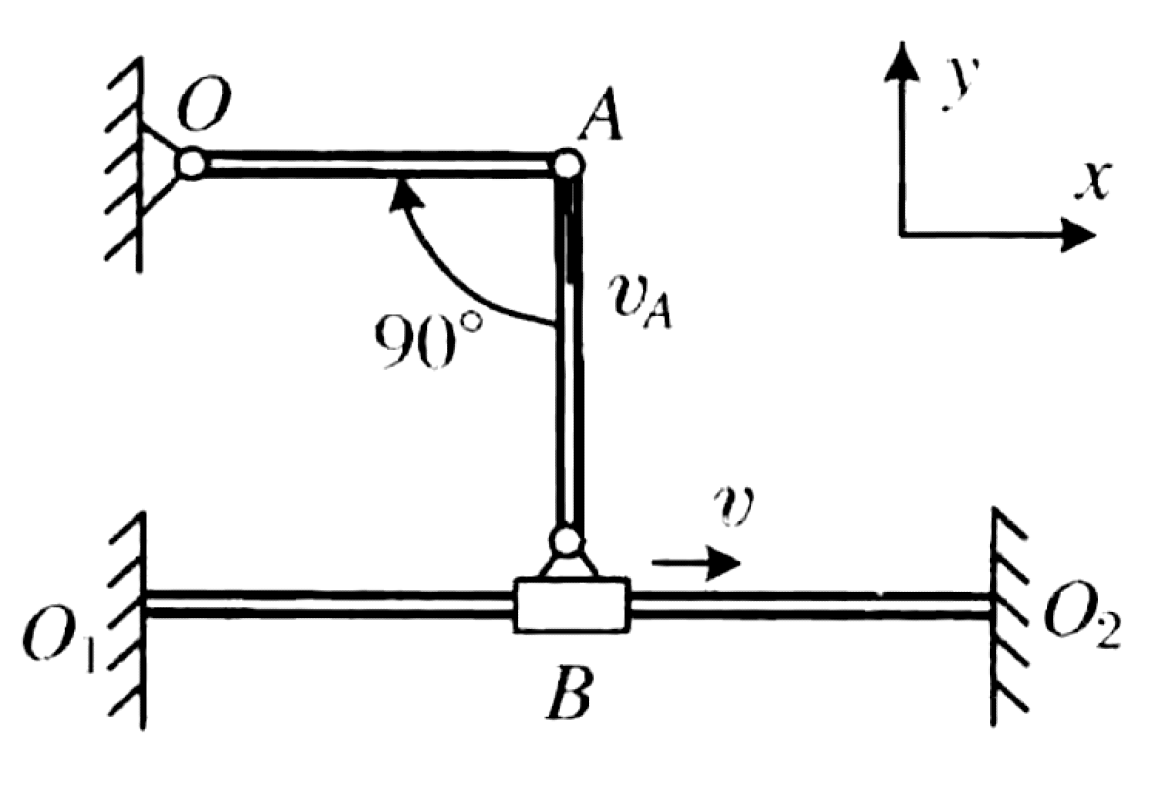
In the mechanism shown, rods OA and AB have equal length, $\overline{OA} = \overline{AB} = a$. Slider B moves with a constant velocity $v$. At the instant shown, OA is horizontal and perpendicular to the vertical rod AB.
- Find the angular velocities of rods OA ($\omega_{OA}$) and AB ($\omega_{AB}$).
- Find the angular accelerations of rods OA ($\beta_{OA}$) and AB ($\beta_{AB}$).
- Find the angular velocities and angular acceleration of rods OA and AB when the angle between OA and AB is at $60^{\circ}$.
P0736-problem-1
[Q1] At the instant shown: Angular velocity of OA: $\omega_{OA} = 0$ Angular velocity of AB: $\omega_{AB} = \frac{v}{a}$ (CCW)
[Q2] At the instant shown: Angular acceleration of OA: $\beta_{OA} = -\frac{v^2}{a^2}$ (Clockwise) Angular acceleration of AB: $\beta_{AB} = 0$
[Q3] When the angle between OA and AB is $60^{\circ}$: Angular velocity of OA: $\omega_{OA} = \frac{v}{a}$ (CCW) Angular velocity of AB: $\omega_{AB} = \frac{v}{a}$ (CCW) Angular acceleration of OA: $\beta_{OA} = -\frac{v^2}{a^2\sqrt{3}}$ (Clockwise) Angular acceleration of AB: $\beta_{AB} = \frac{v^2}{a^2\sqrt{3}}$ (CCW)
Coordinate System and Kinematic Relations Let the fixed pivot O be the origin (0,0). The slider B moves along a horizontal track. From the initial configuration, where A is at $(a,0)$ and B is at $(a,-a)$, the track for slider B is at $y = -a$. The velocity and acceleration of any two points A and B on a rigid body are related by:
$\vec{v}_B = \vec{v}_A + \vec{\omega} \times \vec{r}_{B/A}$ $\vec{a}_B = \vec{a}_A + \vec{\beta} \times \vec{r}_{B/A} - \omega^2 \vec{r}_{B/A}$The velocity and acceleration of point A, which is on a body rotating about a fixed point O, are:
$\vec{v}_A = \vec{\omega}_{OA} \times \vec{r}_{A/O}$ $\vec{a}_A = \vec{\beta}_{OA} \times \vec{r}_{A/O} - \omega_{OA}^2 \vec{r}_{A/O}$We are given that slider B moves with a constant velocity $\vec{v}_B = v \hat{i}$, which implies its acceleration is $\vec{a}_B = 0$. We define counter-clockwise (CCW) rotations as positive, so $\vec{\omega} = \omega \hat{k}$ and $\vec{\beta} = \beta \hat{k}$.
Part 1: Initial Instant (OA Horizontal, AB Vertical)
At the instant shown, the positions are:
$\vec{r}_{A/O} = a\hat{i}$ $\vec{r}_{B/A} = -a\hat{j}$[Q1] Angular Velocities First, find the velocity of point A:
$\vec{v}_A = \vec{\omega}_{OA} \times \vec{r}_{A/O} = (\omega_{OA}\hat{k}) \times (a\hat{i}) = a\omega_{OA}\hat{j}$Now, relate the velocity of B to A:
$\vec{v}_B = \vec{v}_A + \vec{\omega}_{AB} \times \vec{r}_{B/A}$ $v\hat{i} = a\omega_{OA}\hat{j} + (\omega_{AB}\hat{k}) \times (-a\hat{j}) = a\omega_{OA}\hat{j} + a\omega_{AB}\hat{i}$Equating the vector components: x-component: $v = a\omega_{AB} \implies \omega_{AB} = \frac{v}{a}$ y-component: $0 = a\omega_{OA} \implies \omega_{OA} = 0$
At this instant, rod OA is momentarily at rest, at its maximum horizontal extension.
[Q2] Angular Accelerations First, find the acceleration of point A. Since $\omega_{OA} = 0$:
$\vec{a}_A = \vec{\beta}_{OA} \times \vec{r}_{A/O} - \omega_{OA}^2 \vec{r}_{A/O} = (\beta_{OA}\hat{k}) \times (a\hat{i}) - 0 = a\beta_{OA}\hat{j}$Now, relate the acceleration of B to A. We know $\vec{a}_B = 0$:
$\vec{a}_B = \vec{a}_A + \vec{\beta}_{AB} \times \vec{r}_{B/A} - \omega_{AB}^2 \vec{r}_{B/A}$ $0 = (a\beta_{OA}\hat{j}) + (\beta_{AB}\hat{k}) \times (-a\hat{j}) - (\frac{v}{a})^2 (-a\hat{j})$ $0 = a\beta_{OA}\hat{j} + a\beta_{AB}\hat{i} + \frac{v^2}{a}\hat{j}$ $0 = (a\beta_{AB})\hat{i} + (a\beta_{OA} + \frac{v^2}{a})\hat{j}$Equating the vector components: x-component: $a\beta_{AB} = 0 \implies \beta_{AB} = 0$ y-component: $a\beta_{OA} + \frac{v^2}{a} = 0 \implies \beta_{OA} = -\frac{v^2}{a^2}$
The negative sign indicates a clockwise angular acceleration for rod OA.
Part 2: Angle between OA and AB is $60^{\circ}$
[Q3] Angular Velocities and Accelerations First, we determine the geometry. With $\overline{OA} = \overline{AB} = a$ and $\angle OAB = 60^{\circ}$, the triangle OAB is equilateral, so $\overline{OB}=a$. Since O is at (0,0) and B is on the line $y=-a$ at $(x_B, -a)$, we have:
$\overline{OB}^2 = x_B^2 + (-a)^2 = a^2 \implies x_B^2 = 0 \implies x_B=0$.So, B is at $(0, -a)$. The position of A must satisfy its distance from O(0,0) and B(0,-a) is $a$.
$x_A^2 + y_A^2 = a^2$ $x_A^2 + (y_A+a)^2 = a^2 \implies x_A^2+y_A^2+2ay_A+a^2 = a^2$Substituting $x_A^2+y_A^2 = a^2$: $a^2+2ay_A+a^2=a^2 \implies y_A = -a/2$. Then $x_A^2 + (-a/2)^2 = a^2 \implies x_A = \pm \frac{a\sqrt{3}}{2}$. We choose the configuration with $x_A > 0$. The position vectors are:
$\vec{r}_{A/O} = \frac{a\sqrt{3}}{2}\hat{i} - \frac{a}{2}\hat{j}$ $\vec{r}_{B/A} = \vec{r}_B - \vec{r}_A = (0\hat{i} - a\hat{j}) - (\frac{a\sqrt{3}}{2}\hat{i} - \frac{a}{2}\hat{j}) = -\frac{a\sqrt{3}}{2}\hat{i} - \frac{a}{2}\hat{j}$Angular Velocities:
$\vec{v}_A = \omega_{OA}\hat{k} \times (\frac{a\sqrt{3}}{2}\hat{i} - \frac{a}{2}\hat{j}) = \frac{a\omega_{OA}}{2}(\hat{i} + \sqrt{3}\hat{j})$ $\vec{v}_B = \vec{v}_A + \omega_{AB}\hat{k} \times (-\frac{a\sqrt{3}}{2}\hat{i} - \frac{a}{2}\hat{j})$ $v\hat{i} = \frac{a\omega_{OA}}{2}(\hat{i} + \sqrt{3}\hat{j}) + \frac{a\omega_{AB}}{2}(\hat{i} - \sqrt{3}\hat{j})$x-comp: $v = \frac{a}{2}(\omega_{OA} + \omega_{AB})$ y-comp: $0 = \frac{a\sqrt{3}}{2}(\omega_{OA} - \omega_{AB}) \implies \omega_{OA} = \omega_{AB}$ Substituting into the x-comp equation: $v = \frac{a}{2}(2\omega_{OA}) \implies \omega_{OA} = \frac{v}{a}$. Thus, $\omega_{OA} = \omega_{AB} = \frac{v}{a}$.
Angular Accelerations: With $\vec{a}_B=0$:
$0 = \vec{a}_A + \vec{a}_{B/A} = (\vec{\beta}_{OA} \times \vec{r}_{A/O} - \omega_{OA}^2 \vec{r}_{A/O}) + (\vec{\beta}_{AB} \times \vec{r}_{B/A} - \omega_{AB}^2 \vec{r}_{B/A})$ $0 = \frac{a\beta_{OA}}{2}(\hat{i} + \sqrt{3}\hat{j}) - (\frac{v}{a})^2(\frac{a\sqrt{3}}{2}\hat{i} - \frac{a}{2}\hat{j}) + \frac{a\beta_{AB}}{2}(\hat{i} - \sqrt{3}\hat{j}) - (\frac{v}{a})^2(-\frac{a\sqrt{3}}{2}\hat{i} - \frac{a}{2}\hat{j})$x-comp: $0 = \frac{a}{2}(\beta_{OA} + \beta_{AB}) - \frac{v^2\sqrt{3}}{2a} + \frac{v^2\sqrt{3}}{2a} \implies \beta_{AB} = -\beta_{OA}$ y-comp: $0 = \frac{a\sqrt{3}}{2}(\beta_{OA} - \beta_{AB}) + \frac{v^2}{2a} + \frac{v^2}{2a} = \frac{a\sqrt{3}}{2}(\beta_{OA} - (-\beta_{OA})) + \frac{v^2}{a}$
$0 = a\sqrt{3}\beta_{OA} + \frac{v^2}{a} \implies \beta_{OA} = -\frac{v^2}{a^2\sqrt{3}}$Thus, $\beta_{AB} = - \beta_{OA} = \frac{v^2}{a^2\sqrt{3}}$.