Source: Physics Competition - Mechanics
Problem Sets:
Problem
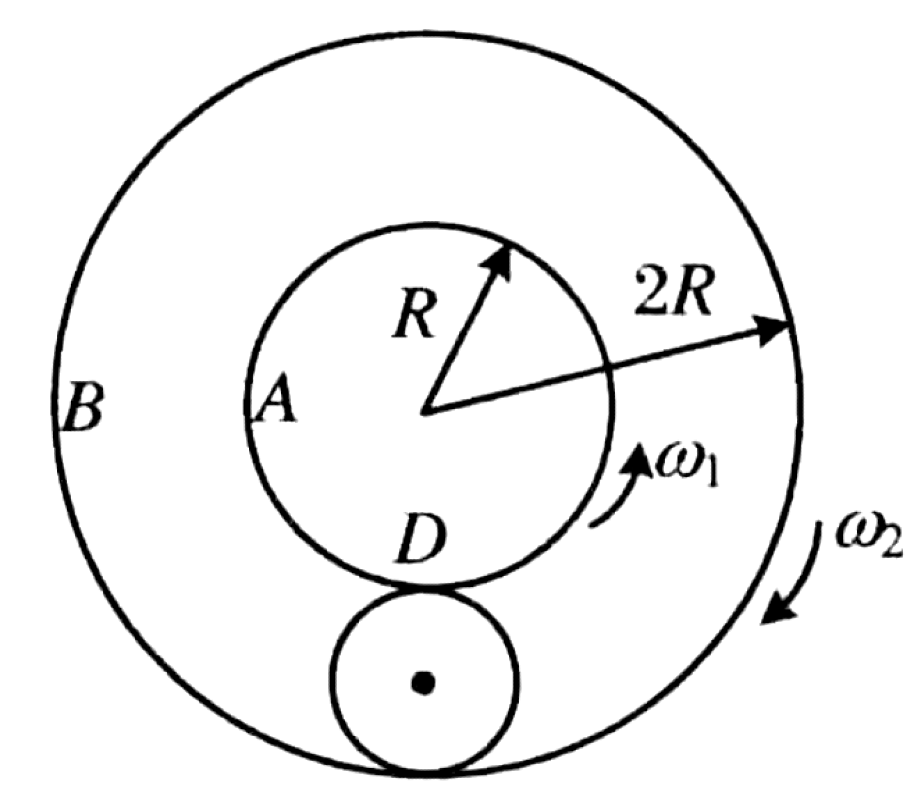
As shown in the figure, two coaxial thin-walled cylinders A and B have radii of $R$ and $2R$, respectively. A small cylinder with a radius of $R/2$ is placed between them. Cylinders A and B rotate uniformly with angular velocities $\omega_1$ and $\omega_2$ in opposite directions. There is no slipping at the contact points D (with A) and C (with B).
- What is the time required for the small cylinder to complete one revolution relative to the ground and relative to cylinder B?
- What is the magnitude of the acceleration of point C on the small cylinder relative to the ground and relative to cylinder A?
P0734-problem-1
[Q1] $T_{S,G} = \frac{6\pi}{|2\omega_2 - \omega_1|}$, $T_{S,B} = \frac{6\pi}{\omega_1 + \omega_2}$ [Q2] $a_{C,G} = \frac{2R}{3}(\omega_1^2 + 2\omega_1\omega_2 + 4\omega_2^2)$, $a_{C,A} = \frac{8R}{3}(\omega_1+\omega_2)^2$
Let the radii be $R_A=R$, $R_B=2R$, and $r=R/2$. Let the orbital angular velocity of the small cylinder's center be $\Omega$ and its spin angular velocity be $\omega_S$. Let counter-clockwise (CCW) be the positive direction. As shown, A rotates clockwise ($\omega_A = -\omega_1$) and B rotates CCW ($\omega_B = \omega_2$). The center of the small cylinder orbits at a radius $R_{O'} = R+r = 3R/2$.
The tangential velocities at the contact points must match (no-slip condition). The velocity of a point on the small cylinder is $v = v_{O'} \pm v_{spin} = \Omega R_{O'} \pm \omega_S r$. On cylinder A (inner contact point D):
$$v_D = \Omega \frac{3R}{2} - \omega_S \frac{R}{2} = \omega_A R_A = -\omega_1 R \implies 3\Omega - \omega_S = -2\omega_1$$On cylinder B (outer contact point C):
$$v_C = \Omega \frac{3R}{2} + \omega_S \frac{R}{2} = \omega_B R_B = 2\omega_2 R \implies 3\Omega + \omega_S = 4\omega_2$$Solving this system of equations yields:
$$\Omega = \frac{2\omega_2 - \omega_1}{3} \quad \text{and} \quad \omega_S = \omega_1 + 2\omega_2$$[Q1] The period of revolution is $T = 2\pi/|\omega|$. Relative to ground, the period is determined by the orbital angular velocity $\Omega$:
$$T_{S,G} = \frac{2\pi}{|\Omega|} = \frac{6\pi}{|2\omega_2 - \omega_1|}$$The angular velocity relative to cylinder B is $\Omega_{S,B} = \Omega - \omega_B = \frac{2\omega_2 - \omega_1}{3} - \omega_2 = -\frac{\omega_1 + \omega_2}{3}$.
$$T_{S,B} = \frac{2\pi}{|\Omega_{S,B}|} = \frac{6\pi}{\omega_1 + \omega_2}$$[Q2] The acceleration of point C is purely centripetal and directed towards the central axis. It is the sum of the acceleration of the small cylinder's center ($a_{O',G}$) and the acceleration of point C relative to its center ($a_{C,O'}$).
$$a_{C,G} = a_{O',G} + a_{C,O'} = \Omega^2 R_{O'} + \omega_S^2 r = \Omega^2 \frac{3R}{2} + \omega_S^2 \frac{R}{2}$$ $$a_{C,G} = \left(\frac{2\omega_2 - \omega_1}{3}\right)^2 \frac{3R}{2} + (\omega_1 + 2\omega_2)^2 \frac{R}{2} = \frac{2R}{3}(\omega_1^2 + 2\omega_1\omega_2 + 4\omega_2^2)$$The acceleration of C relative to cylinder A is found using the relative acceleration formula for a rotating frame, $\vec{a}_{C,G} = \vec{a}_{C,A} + \vec{a}_{P,G} + \vec{a}_{cor}$, where P is a point in frame A coincident with C, and $\vec{a}_{cor} = 2\vec{\omega}_A \times \vec{v}_{C,A}$ is the Coriolis acceleration. All acceleration vectors are collinear.
$$a_{P,G} = \omega_A^2 (2R) = \omega_1^2 (2R)$$ $$v_{C,A} = v_{C,G} - v_{P,G} = 2\omega_2 R - (-\omega_1(2R)) = 2R(\omega_1 + \omega_2)$$ $$a_{cor} = 2\omega_A v_{C,A} = 2(-\omega_1)(2R(\omega_1+\omega_2)) = -4R\omega_1(\omega_1+\omega_2)$$ $$a_{C,A} = a_{C,G} - a_{P,G} - a_{cor} = \frac{2R}{3}(\omega_1^2 + 2\omega_1\omega_2 + 4\omega_2^2) - 2R\omega_1^2 + 4R\omega_1(\omega_1+\omega_2) = \frac{8R}{3}(\omega_1+\omega_2)^2$$