Source: Physics Competition - Mechanics
Problem Sets:
Problem
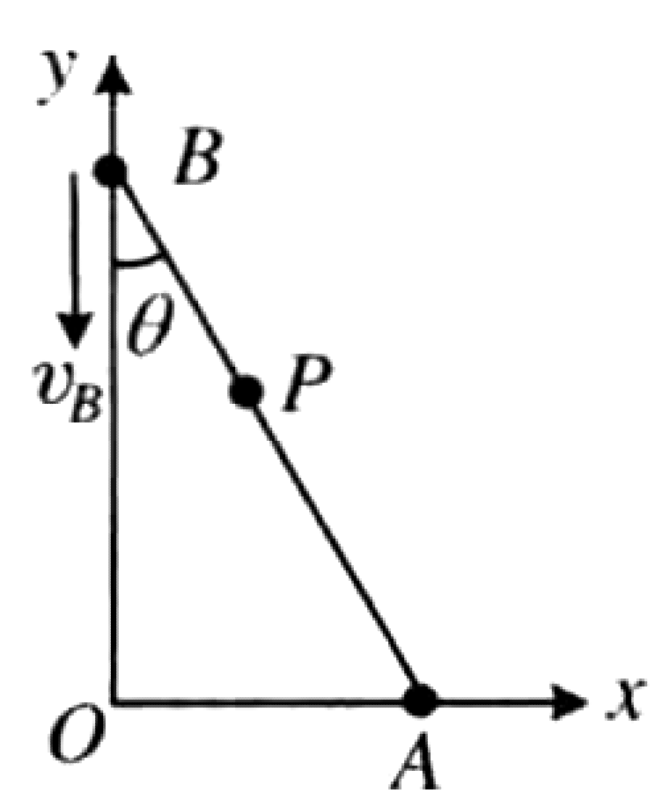
A thin rod AB of length $l$ has its ends A and B constrained to move on the x and y axes, respectively. Point P is on the rod at a distance $\alpha l$ from end B, where $0 < \alpha < 1$.
- Determine the trajectory of point P.
- At the instant when the rod makes an angle $\theta$ with the y-axis, end B moves towards the origin O with a speed of $v_B$. Find the velocity components $v_{Px}$ and $v_{Py}$ of point P.
P0727-problem-1
[Q1] $\left(\frac{x_P}{\alpha l}\right)^2 + \left(\frac{y_P}{(1-\alpha)l}\right)^2 = 1$ [Q2] $v_{Px} = \alpha v_B \cot\theta$, $v_{Py} = -(1-\alpha)v_B$
Let the coordinates of A be $(x_A, 0)$ and B be $(0, y_B)$. Let the rod make an angle $\theta$ with the y-axis. Then $x_A = l\sin\theta$ and $y_B = l\cos\theta$. The coordinates of point P, $(x_P, y_P)$, can be found by section formula:
$$x_P = \alpha x_A + (1-\alpha)x_B = \alpha (l\sin\theta) + (1-\alpha)(0) = \alpha l\sin\theta$$ $$y_P = \alpha y_A + (1-\alpha)y_B = \alpha (0) + (1-\alpha)(l\cos\theta) = (1-\alpha)l\cos\theta$$[Q1] To find the trajectory of P, we eliminate $\theta$:
$$\frac{x_P}{\alpha l} = \sin\theta, \quad \frac{y_P}{(1-\alpha)l} = \cos\theta$$Using the identity $\sin^2\theta + \cos^2\theta = 1$:
$$\left(\frac{x_P}{\alpha l}\right)^2 + \left(\frac{y_P}{(1-\alpha)l}\right)^2 = 1$$This is the equation of an ellipse centered at the origin.
[Q2] To find the velocity components, we differentiate the coordinates of P with respect to time, where $\dot{\theta} = d\theta/dt$:
$$v_{Px} = \frac{dx_P}{dt} = \alpha l \cos\theta \dot{\theta}$$ $$v_{Py} = \frac{dy_P}{dt} = -(1-\alpha)l\sin\theta \dot{\theta}$$The velocity of B is given. $y_B = l\cos\theta$.
$$v_{By} = \frac{dy_B}{dt} = -l\sin\theta \dot{\theta}$$Since B moves towards the origin with speed $v_B$, its velocity is $-v_B$.
$$-v_B = -l\sin\theta \dot{\theta} \implies \dot{\theta} = \frac{v_B}{l\sin\theta}$$Substituting $\dot{\theta}$ into the expressions for $v_{Px}$ and $v_{Py}$:
$$v_{Px} = \alpha l \cos\theta \left( \frac{v_B}{l\sin\theta} \right) = \alpha v_B \cot\theta$$ $$v_{Py} = -(1-\alpha)l\sin\theta \left( \frac{v_B}{l\sin\theta} \right) = -(1-\alpha)v_B$$