Source: Physics Competition - Mechanics
Problem Sets:
Problem
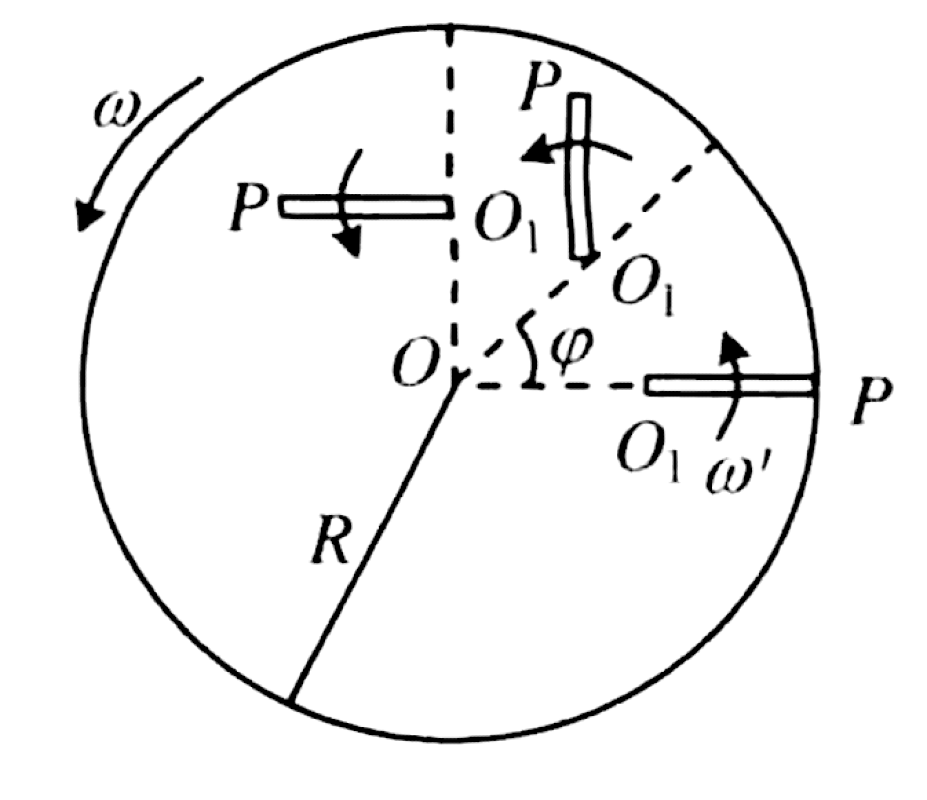
As shown in the figure, a large horizontal disk of radius R rotates about a fixed vertical axis O with a constant angular velocity ω. A second vertical axis O₁ is fixed on the disk at a distance $|OO_1| = R/2$. A rigid rod O₁P of length $l = R/2$ is pivoted at O₁ and rotates with a constant angular velocity ω' = ω relative to the disk. The position of the rod relative to the disk is given by the angle φ between the line segment OO₁ and the rod O₁P. At time t=0, φ=0, meaning O, O₁, and P are collinear.
- Determine the absolute velocity $\vec{v}P$ and the absolute acceleration $\vec{a}P$ of the endpoint P when φ is 90 degree.
- Determine the angle φ when the absolute velocity and acceleration are maximum.
P0723-problem-1
[Q1] At $\phi=90^\circ$, choosing a frame where $\vec{r}_{O_1}$ is along $\hat{i}$ and $\vec{r}_{P/O_1}$ is along $\hat{j}$: The absolute velocity is $\vec{v}_P = \omega R \hat{i} - \frac{\omega R}{2}\hat{j}$, with magnitude $|\vec{v}_P| = \frac{\sqrt{5}}{2}\omega R$. The absolute acceleration is $\vec{a}_P = -\frac{\omega^2 R}{2}\hat{i} - 2\omega^2 R\hat{j}$, with magnitude $|\vec{a}_P| = \frac{\sqrt{17}}{2}\omega^2 R$.
[Q2] The magnitudes of both the absolute velocity and the absolute acceleration are maximum when $\cos\phi=1$. This occurs when the angle $\phi = 0$. At this angle, points O, O₁, and P are collinear with P farthest from O.
Here is the solution based on the principles of relative motion for rigid bodies.
1. Kinematic Framework We analyze the motion of point P by considering the motion of the pivot O₁ and the motion of P relative to O₁. The absolute velocity and acceleration of P are given by:
$\vec{v}_P = \vec{v}_{O_1} + \vec{v}_{P/O_1}$ $\vec{a}_P = \vec{a}_{O_1} + \vec{a}_{P/O_1}$Point O₁ is in circular motion about O with angular velocity $\vec{\omega}$. The rod O₁P rotates with an absolute angular velocity $\vec{\Omega}$, which is the sum of the disk's angular velocity $\vec{\omega}$ and the rod's angular velocity relative to the disk, $\vec{\omega}'$. Given $\omega' = \omega$ and assuming they rotate in the same direction as depicted, the absolute angular velocity of the rod is $\vec{\Omega} = \vec{\omega} + \vec{\omega}' = 2\vec{\omega}$.
2. General Expressions for Velocity and Acceleration Let $\vec{r}_{O_1}$ be the position vector from O to O₁ and $\vec{r}_{P/O_1}$ be the position vector from O₁ to P. The velocity of O₁ is $\vec{v}_{O_1} = \vec{\omega} \times \vec{r}_{O_1}$. The acceleration of O₁ is the centripetal acceleration $\vec{a}_{O_1} = \vec{\omega} \times (\vec{\omega} \times \vec{r}_{O_1}) = -\omega^2 \vec{r}_{O_1}$.
The velocity of P relative to O₁ is due to the absolute rotation of the rod O₁P about O₁. This is not entirely correct. The velocity of P is given by $\vec{v}_P = \frac{d}{dt}(\vec{r}_{O_1} + \vec{r}_{P/O_1}) = \dot{\vec{r}}_{O_1} + \dot{\vec{r}}_{P/O_1} = \vec{v}_{O_1} + \vec{\Omega} \times \vec{r}_{P/O_1}$. So, the absolute velocity of P is:
$$\vec{v}_P = \vec{\omega} \times \vec{r}_{O_1} + \vec{\Omega} \times \vec{r}_{P/O_1} = \vec{\omega} \times \vec{r}_{O_1} + 2\vec{\omega} \times \vec{r}_{P/O_1}$$The absolute acceleration of P is $\vec{a}_P = \dot{\vec{v}}_P = \vec{a}_{O_1} + \frac{d}{dt}(\vec{\Omega} \times \vec{r}_{P/O_1}) = \vec{a}_{O_1} + \vec{\Omega} \times \dot{\vec{r}}_{P/O_1} = \vec{a}_{O_1} + \vec{\Omega} \times (\vec{\Omega} \times \vec{r}_{P/O_1})$. This gives the centripetal acceleration of P about O₁ with respect to the absolute angular velocity $\vec{\Omega}$: $\vec{a}_{P/O_1} = -(2\omega)^2 \vec{r}_{P/O_1} = -4\omega^2\vec{r}_{P/O_1}$. So, the absolute acceleration of P is:
$$\vec{a}_P = -\omega^2 \vec{r}_{O_1} - 4\omega^2 \vec{r}_{P/O_1}$$[Q1] Velocity and Acceleration at φ = 90° At the instant when $\phi = 90^\circ$, we can set up a coordinate system where OO₁ is along the x-axis and O₁P is along the y-axis.
$\vec{r}_{O_1} = \frac{R}{2}\hat{i}$ and $\vec{r}_{P/O_1} = l\hat{j} = \frac{R}{2}\hat{j}$.From the figure, the rotation is clockwise, so $\vec{\omega} = -\omega\hat{k}$. Consequently, $\vec{\Omega} = -2\omega\hat{k}$.
-
Velocity $\vec{v}_P$:
$$\vec{v}_P = (-\omega\hat{k}) \times (\frac{R}{2}\hat{i}) + (-2\omega\hat{k}) \times (\frac{R}{2}\hat{j})$$ $$\vec{v}_P = -\frac{\omega R}{2}\hat{j} - \omega R(-\hat{i}) = \omega R \hat{i} - \frac{\omega R}{2}\hat{j}$$The magnitude is $|\vec{v}_P| = \sqrt{(\omega R)^2 + (-\frac{\omega R}{2})^2} = \frac{\sqrt{5}}{2}\omega R$.
-
Acceleration $\vec{a}_P$:
$$\vec{a}_P = -\omega^2(\frac{R}{2}\hat{i}) - 4\omega^2(\frac{R}{2}\hat{j})$$ $$\vec{a}_P = -\frac{\omega^2 R}{2}\hat{i} - 2\omega^2 R\hat{j}$$The magnitude is $|\vec{a}_P| = \sqrt{(-\frac{\omega^2 R}{2})^2 + (-2\omega^2 R)^2} = \frac{\sqrt{17}}{2}\omega^2 R$.
[Q2] Angle φ for Maximum Velocity and Acceleration We find the magnitudes of the velocity and acceleration as a function of the angle $\phi$.
-
Maximum Velocity: The squared magnitude of the velocity is $|\vec{v}_P|^2 = (\vec{\omega} \times \vec{r}_{O_1} + 2\vec{\omega} \times \vec{r}_{P/O_1}) \cdot (\vec{\omega} \times \vec{r}_{O_1} + 2\vec{\omega} \times \vec{r}_{P/O_1})$. Using the identity $(\vec{A}\times\vec{B})\cdot(\vec{A}\times\vec{C}) = A^2(\vec{B}\cdot\vec{C}) - (\vec{A}\cdot\vec{B})(\vec{A}\cdot\vec{C})$ and that $\vec{\omega}$ is perpendicular to $\vec{r}$ vectors:
$$|\vec{v}_P|^2 = \omega^2|\vec{r}_{O_1}|^2 + 4\omega^2|\vec{r}_{P/O_1}|^2 + 4\omega^2(\vec{r}_{O_1} \cdot \vec{r}_{P/O_1})$$ $$|\vec{v}_P|^2 = \omega^2(\frac{R}{2})^2 + 4\omega^2(\frac{R}{2})^2 + 4\omega^2(\frac{R}{2})(\frac{R}{2})\cos\phi$$ $$|\vec{v}_P|^2 = \frac{\omega^2 R^2}{4}(1 + 4 + 4\cos\phi) = \frac{\omega^2 R^2}{4}(5 + 4\cos\phi)$$The magnitude $|\vec{v}_P|$ is maximum when $\cos\phi$ is maximum, i.e., $\cos\phi=1$. This occurs at $\phi = 0$.
-
Maximum Acceleration: The squared magnitude of the acceleration is $|\vec{a}_P|^2 = (-\omega^2 \vec{r}_{O_1} - 4\omega^2 \vec{r}_{P/O_1}) \cdot (-\omega^2 \vec{r}_{O_1} - 4\omega^2 \vec{r}_{P/O_1})$.
$$|\vec{a}_P|^2 = \omega^4 (\vec{r}_{O_1} + 4\vec{r}_{P/O_1}) \cdot (\vec{r}_{O_1} + 4\vec{r}_{P/O_1})$$ $$|\vec{a}_P|^2 = \omega^4 (|\vec{r}_{O_1}|^2 + 16|\vec{r}_{P/O_1}|^2 + 8(\vec{r}_{O_1} \cdot \vec{r}_{P/O_1}))$$ $$|\vec{a}_P|^2 = \omega^4 ((\frac{R}{2})^2 + 16(\frac{R}{2})^2 + 8(\frac{R}{2})(\frac{R}{2})\cos\phi)$$ $$|\vec{a}_P|^2 = \omega^4 (\frac{R^2}{4} + 4R^2 + 2R^2\cos\phi) = \omega^4 R^2 (\frac{17}{4} + 2\cos\phi)$$The magnitude $|\vec{a}_P|$ is maximum when $\cos\phi$ is maximum, i.e., $\cos\phi=1$. This occurs at $\phi = 0$.